Past Robots
A legacy of innovation. Explore the evolution of our robot design, from our earliest to our latest championship-winning machines.
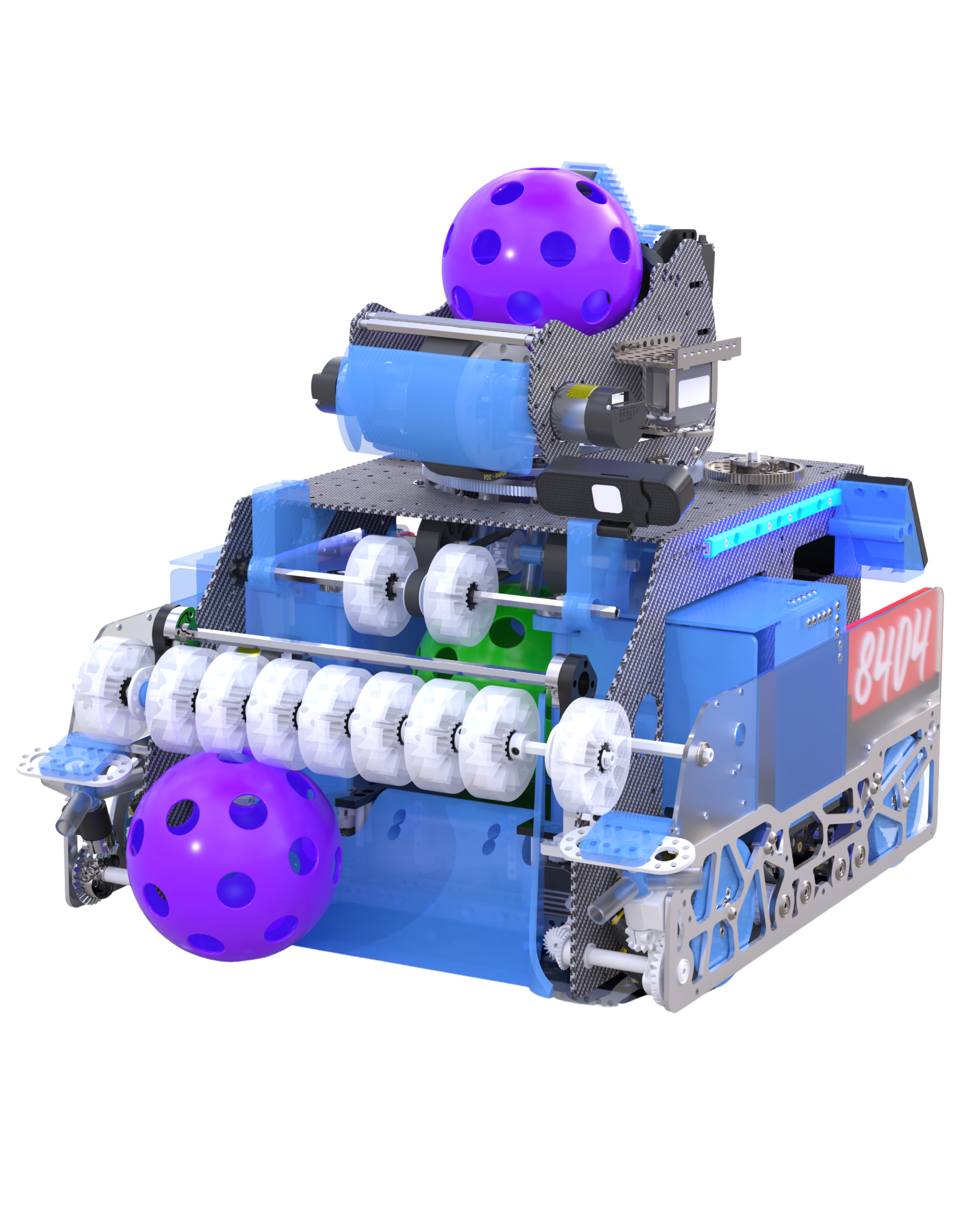
2025-2026: DECODE
Custom silicone wheels spinning at 2000 RPM pull artifacts in instantly to our DECODE robot, feeding them through a single-channel transition and pocketed color-sorting indexer into a dual-motor flywheel turret that stays locked onto the goal from anywhere on the field. In endgame, the robot tilts onto its rear wheels for full park points.
Features:
- Custom silicone compliant wheels spinning at 2000 RPM for instant multi-angle artifact intake
- Single-channel transition with closeable sorting chambers for color-based artifact indexing
- Dual-motor weighted flywheel at 6000 RPM on a full 360° V-bearing mounted turret
- Continuous goal-locking via April Tag + odometry fusion — accurate even while moving
- Hybrid carbon fiber and aluminum build with dual-stage bare motor reduction for weight savings
- Rear-tilt endgame mechanism for full park points with a compatible alliance partner

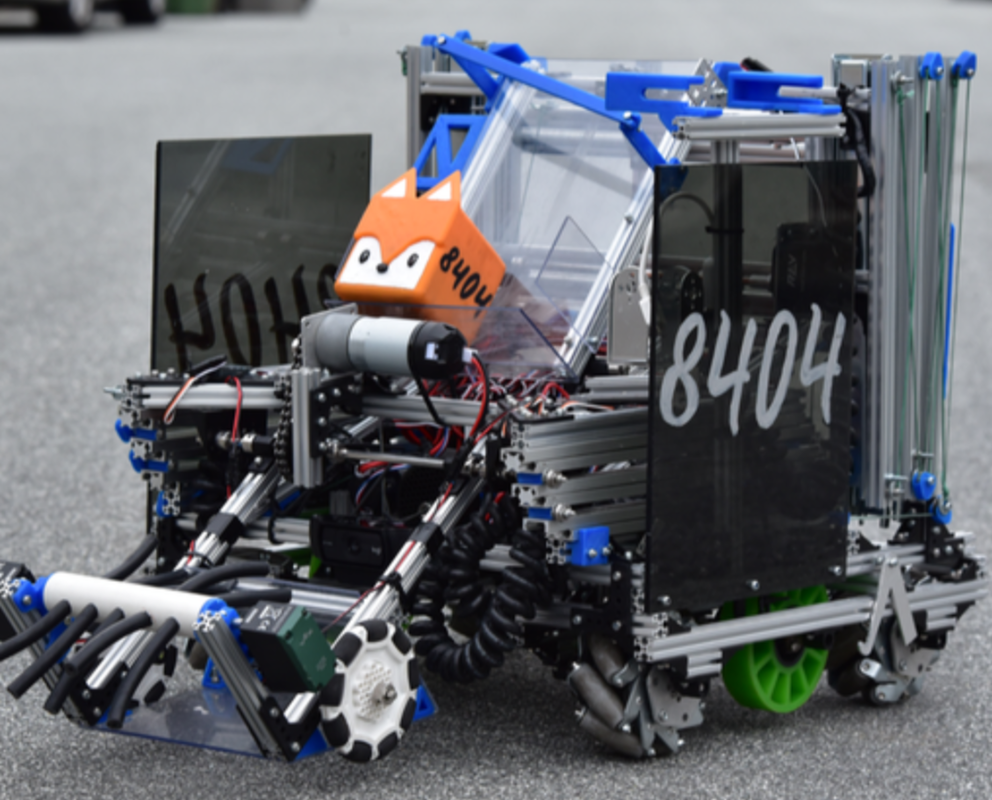
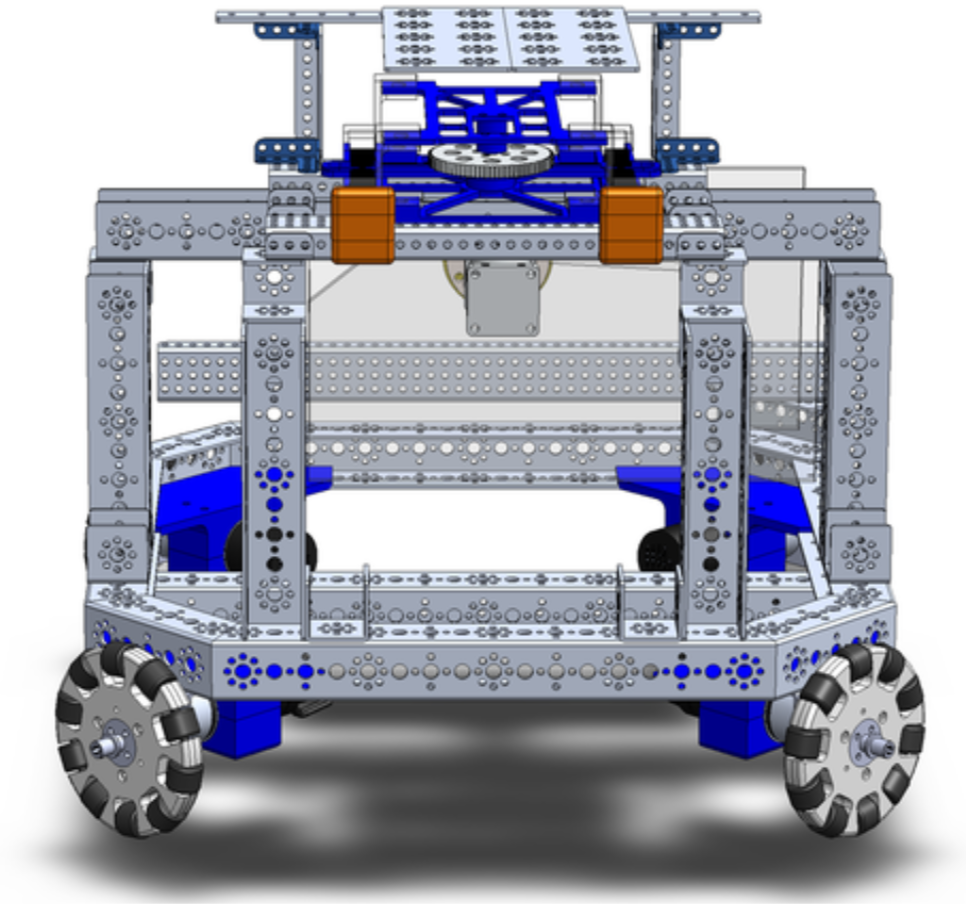
2024-2025: INTO THE DEEP
Our INTO THE DEEP robot moves quickly and smoothly across the field, using a front intake miniturret to collect samples and an output claw to score them in the high basket. Advanced vision and motion algorithms enable it to coordinate effectively with alliance partners during both autonomous and driver-controlled phases.
Features:
- Ultra Compact 12x12 inch parallel plate drivebase
- Multi-Axis intake miniturret
- Can reach the high basket and rung
- Uses custom AI algorithms to swiftly pick up samples in a contested submersible

2023-2024: CENTERSTAGE
Our 2023-2024 season robot features our most advanced parallel plate drivebase yet and competed in the South Bay League. It can pick up two pixels at a time and can accurately and precisely output each pixel on the backdrop.
Features:
- Parallel plate drivebase
- Auxiliary intake mechanism
- Can go through the middle gate
- A downward flipping output mechanism that sits flush with the backdrop
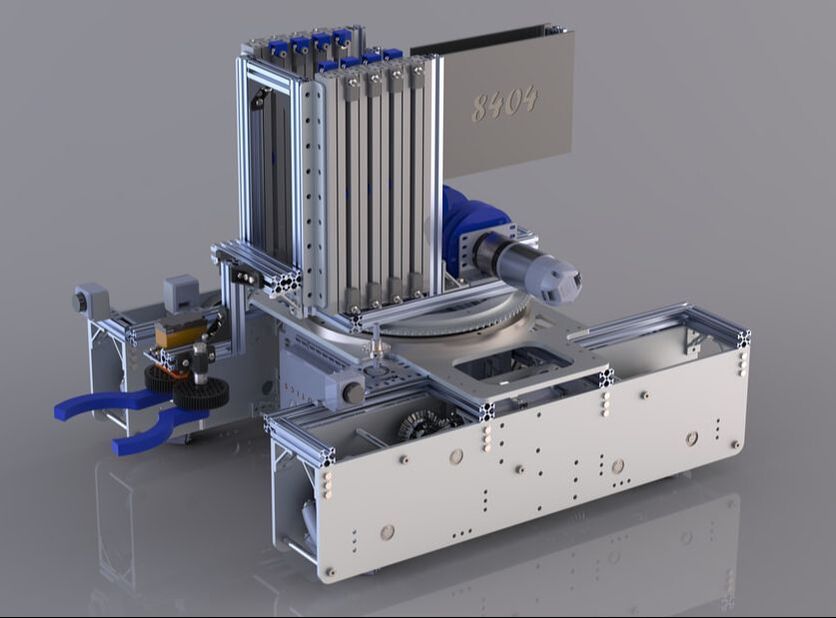
2022-2023: POWERPLAY
This robot was designed for high-speed cone cycling. Featuring a differential-based lift and a turret, it could quickly score on any height of junction from a single stable position, making it a formidable opponent during the POWERPLAY season.
Features:
- Differential cascading lift
- 360-degree continuous turret
- Automated cone alignment system
- Robust mecanum wheel drivebase
2021-2022: FREIGHT FRENZY
Built for the logistics-themed FREIGHT FRENZY challenge, this robot excelled at rapidly collecting and delivering freight to the shipping hubs. Its multi-directional intake and precise carousel spinner gave us a competitive edge.
Features:
- Omni-directional intake system
- Variable height linear slide lift
- Independent carousel spinner
- Vision-based freight detection

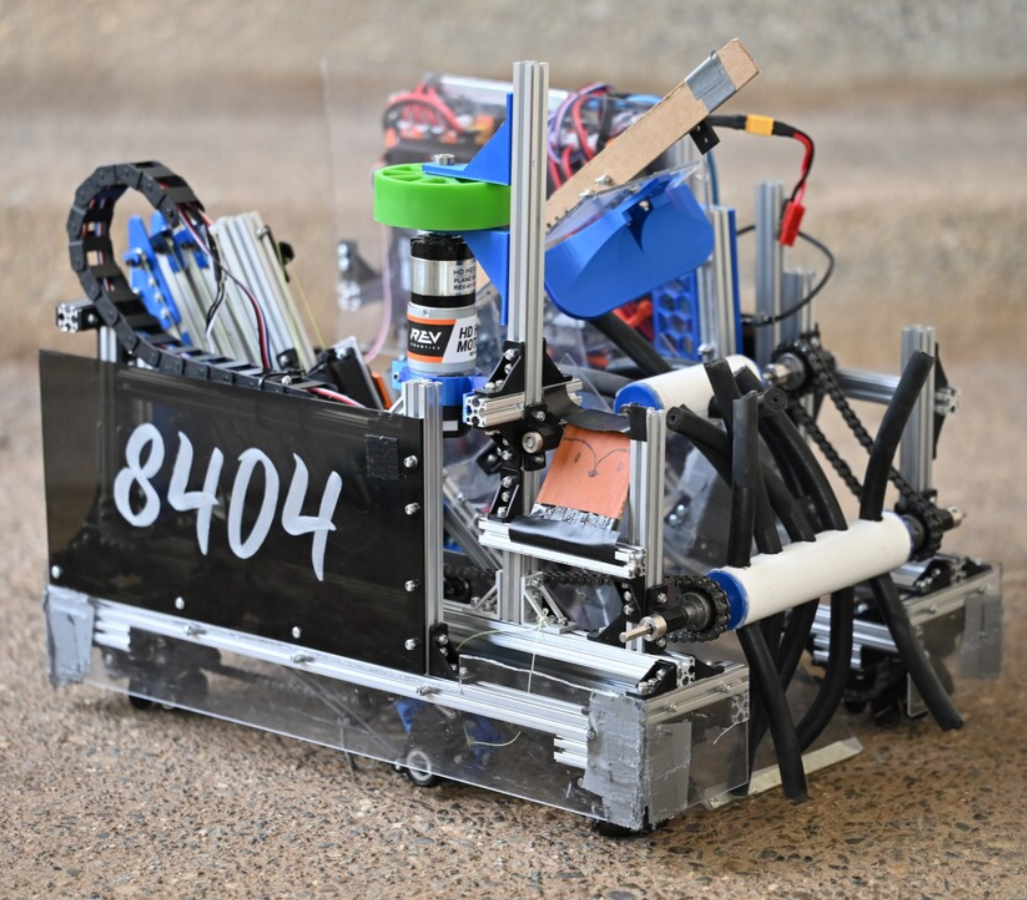
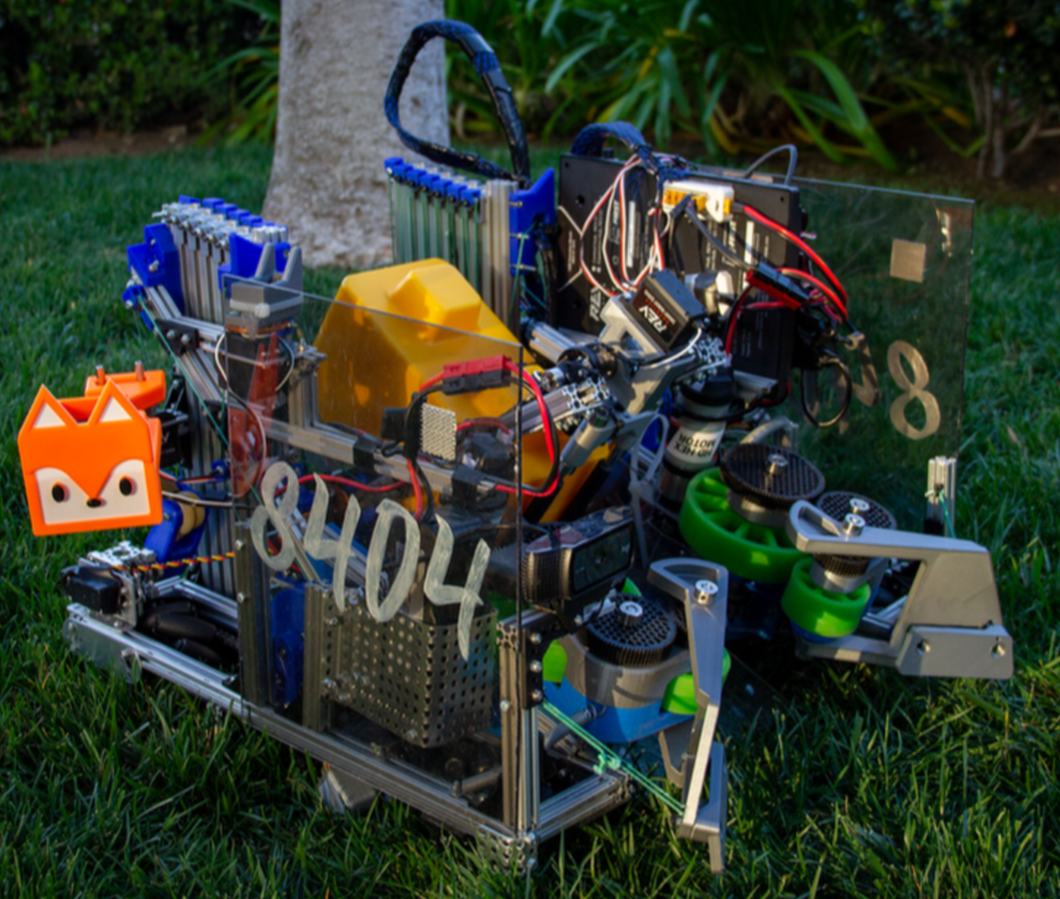
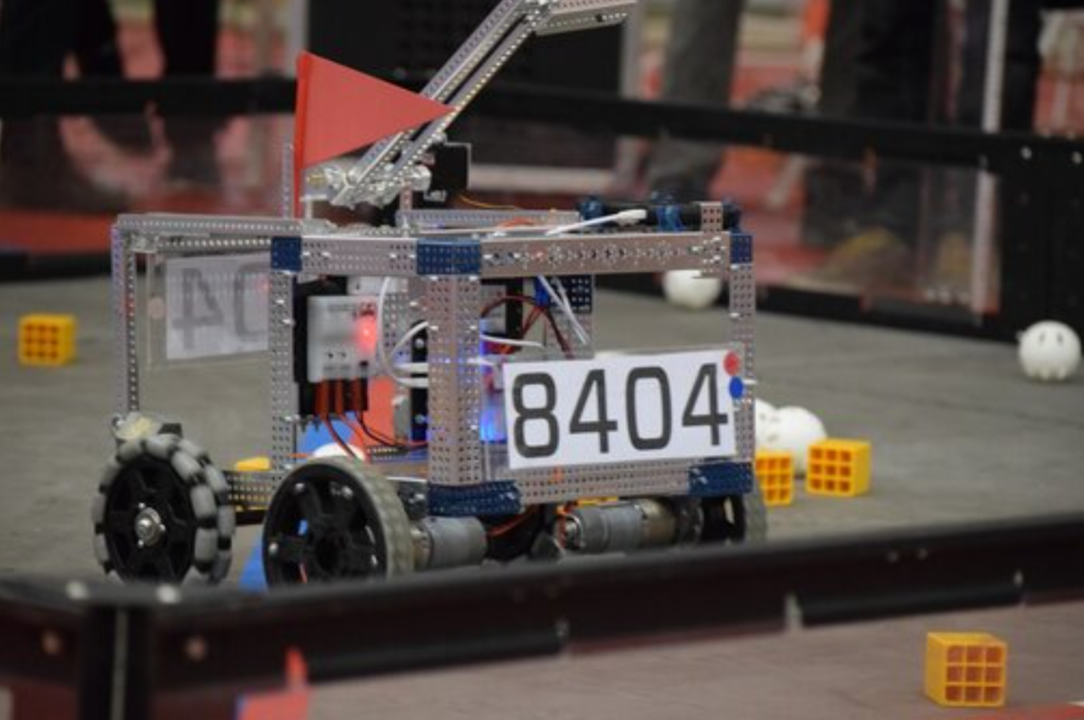
2020-2021: ULTIMATE GOAL
Kunai, named after a traditional Japanese weapon that uses a chain, employs three rows of compliant wheels to quickly intake rings and a flywheel to shoot them across the field. It also features a claw to transport wobble goals, allowing it to accomplish all our game objectives.
Features:
- A 3D printed ramp and hopper
- Three sets of compliant wheel rollers
- Single flywheel powered by two ultraplanetary motors
- 3D printed guide rails
2019-2020: SKYSTONE
Named after the Japanese word for spider, Kumo scuttles swiftly across the field using odometry to track its position. With eight motors, a three-axis claw, compliant intake, and linear lift, it’s built to score in every part of the game.
Features:
- Mecanum Drive
- Linear Lift System
- Charlie - Capstone
- Compliant Wheel Intake System
2018-2019: ROVER RUCKUS
Named after a constellation and a mariner's compass, Pyxis was built for speed with dual linear slides and a mecanum drive to score across all game elements. Sensor fusion and smart navigation algorithms let it perform effectively on either side of the field while complementing its alliance partners.
Features:
- Linear Slides Mineral Intake System
- Linear Lift System
- Mecanum Drive
- Aluminum Hook
- Charlie - Team Marker

2017-2018: RELIC RECOVERY
In the 2017–2018 season, we switched from Tetrix to REV Robotics parts, including their control system, and adopted mecanum wheels over our old omniwheel base. Named Rexxa for its clamp arms that resembled a T-Rex, it used memory foam to grip and hold two glyphs at once.
Features:
- Agility on the field (strafing)
- Clamps to grab onto blocks at any angle with custom 3-D printed clamps and memory foam
- Linear lift built using extrusions
- SpiderWire used for the linear lift
2016-2017: VELOCITY VORTEX
Originally, we considered naming our eight-sided, button-pressing robot Octobutt, but it didn’t quite sound appropriate. Instead, we chose Hachi—Japanese for eight and also the name of a loyal, well-known dog in Japan.
Features:
- Octagonal Omni-Base
- CAD Beacon Pusher
- Particle Launcher
2015-2016: RES-Q
Our robot's climber dunker formed a horn-like hook, inspiring one member to suggest the name Vladimir. To avoid the dark historical reference, we named it Vlad—the Pirate Unicorn That Impales No One.
Features:
- Extreme Agility on the field
- Efficient Climber Dunking

2014-2015: CASCADE EFFECT
In our first year, we built a perfectly cubical base to maximize the 18" limit and allow room for future features. Inspired by its shape, we named the robot Cubert to highlight its cube design.
Features:
- Extreme Agility on the field
- Efficient goal mover